
摘要
传统码头的研究已经很成熟,而自动化码头尤其是堆场空间管理的研究还处于起步阶段。在不断升级的自动化技术应用的背景下,堆场配置需要兼容的方法来解释自动化集装箱码头的新特点,并与其他操作系统协调。考虑进、出口集装箱在一个区块内混合堆垛和多个堆场起重机之间的协作,提出了自动化集装箱码头的动态堆场配置方法。本文通过两个阶段来研究自动化堆场的空间配置问题。第一阶段建立了一个双目标模型,在每个时间窗口内平衡码头和码头之间的工作负荷,优化集装箱从堆场到泊位的总移动距离。在第二阶段,通过最小化堆场起重机到海边的移动距离,确定每个时间窗口中码头位置的具体分配。此外,通过自动化码头实际操作案例的应用,验证了所提出的方法和数学模型能够有效地分配堆场空间,提高自动化集装箱码头的堆场管理水平。
介绍
随着全球集装箱吞吐量的提高和巨型航运业的发展,码头运营管理面临着新的挑战。近年来,越来越多的自动化集装箱码头(ACT)已投入运营或建设,在此,提高集装箱处理能力的新技术途径已应用于堆场管理(Yang等人(2018)),并带来了新的挑战。与传统的堆场管理相比,自动化集装箱码头堆场管理突出了许多新的典型特征。首先,由于进出口集装箱总是混在同一个堆场区块中,因此在分配阶段需要解释更多的装卸过程要求。其次,一个堆场通常配备多个自动化轨道门式起重机(armg), armg之间的合作对于海边和陆地之间的集装箱处理至关重要。第三,ACT中块的交换点是固定的。因此,对高校院落空间配置的研究将面临许多新的挑战。首先,由于进出口集装箱混堆,我们需要考虑在同一个区块同时装卸。其次,由于在同一个block中有多个armg,我们需要考虑armg同时运行时的冲突问题。最后,由于地块的立交点固定在地块两侧,不仅要考虑海侧工作量的平衡,还要考虑陆侧工作量的平衡。本研究提出了一种新的自动化终端堆场空间分配方法,并对上述新特征进行了分析。
码头的集装箱一般分为三类:进口集装箱、出口集装箱和中转集装箱。本文主要研究进口集装箱与出口集装箱混在一个区块内的堆场配置问题。由于转运集装箱通常采用悬臂式armg分块存储,因此本研究不考虑转运集装箱的分配。根据集装箱的运行情况(Wang, 2017),从另一个角度来看,需要处理的进出口集装箱分为待卸集装箱、待装集装箱、待回收集装箱和待接地集装箱四大类。“待取集装箱”指的是将由外部集装箱卡车从集装箱块上运走的集装箱。“集装箱接地”是指将由外部集装箱卡车运输到集装箱块上的集装箱。由于待装载集装箱和待回收集装箱是从其他两类集装箱中转移而来的(图1),因此本文仅对待卸载集装箱和待接地集装箱的分配进行建模。
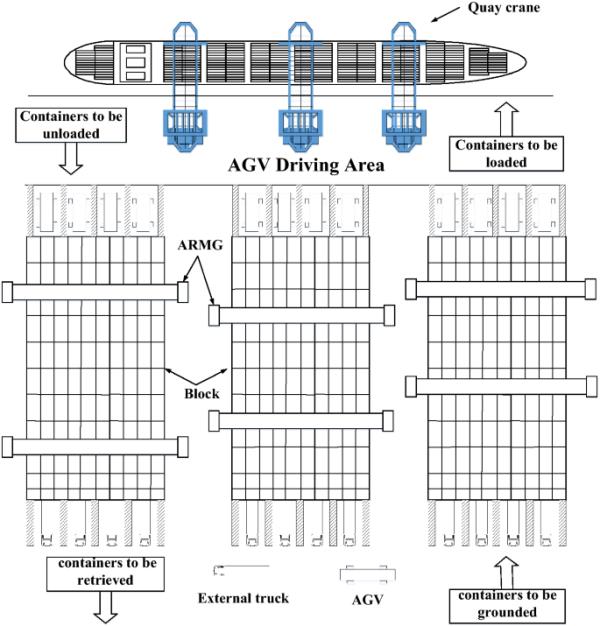
垂直自动化集装箱码头布局
对传统集装箱码头进行了大量的相关研究。Zhen(2014)提出了不确定性条件下出口集装箱堆场模板规划的发展。为了使模板总代价最小,提出了一个不确定条件下的随机规划模型。Zhen等人(2019)建立了一个混合整数规划模型来解决码头起重机(QC)和堆场卡车调度的集成优化问题。Tan等人(2021)利用反应性策略开发了一种前瞻性的BACAP策略,该策略考虑了不确定性下的最低回收成本,并制定了一个随机规划模型。He等人(2021)认为QC驾驶员可以显著影响泊位分配和码头起重机分配的进度,因此对该问题采用了带模型加速算法的混合整数规划模型。尽管考虑到进口和出口集装箱混合在一个区块的情况,管理堆场操作的新技术已经被记录在案,但ACT将制定更多更新的策略。本文的主要贡献包括:(1)针对进出口集装箱混堆情况下堆场空间分配问题,建立了两阶段整数线性规划。(2)考虑了在同一区块内同时运行多个armg的冲突约束。
本文的其余部分组织如下。相关文献见第2节。研究问题见第3节。空间分配问题的两阶段数学公式在第4节中给出。第五部分进行了数值实验,根据实验结果提出了集装箱自动化码头管理的见解。本研究的主要贡献在第6节中总结。
结论
在自动化集装箱码头,堆场管理无疑是制约各作业系统协调作业的瓶颈。本文在确定每个集装箱块的码头分配的同时,平衡每个集装箱块的海边和陆地的工作量,优化集装箱的总移动距离。与以往的研究相比,该方法识别了各时间窗口内各集装箱区块的货舱数,并减少了作业间的冲突。本文的主要研究结果如下:
- 1.
通过分析不同堆场分配目标的影响,建议对于进出口集装箱混堆的自动化码头堆场,集装箱应尽量分散堆放,以达到更均衡的作业。此外,更集中的堆垛有助于减少集装箱装卸的总运输距离,这对实现更低的能源消耗也很重要。
- 2.
通过对堆场吊车能力影响的评价,得出堆场吊车能力对自动化码头堆场配置有显著影响的结论。指出提高堆场起重机的性能,有利于提高堆场的利用率。
- 3.
通过对冲突约束的分析,证明所提出的货仓分配方法有效地降低了堆场起重机之间发生冲突的可能性。然而,在某些情况下,由于从以前的规划阶段继承了分配,冲突无法彻底避免,因此,自动化集装箱码头的堆场清理是不可避免的。
该研究也有局限性,没有考虑不确定性,如船舶到达的不确定性,agv的交通堵塞等。在未来,我们将致力于在确定堆场空间分配时考虑这些不确定性。




